由于前一段时间一直在忙,所以很久没有更新文章了。
不过,好在很多事情终于尘埃落定,也终于有空继续搞我热爱的技术了。
一直想写一篇关于工业机器人的文章,一来是我的老本行(虽然很多年不研究了),二来这真的是一个十分具有挑战的综合技术方向。
不过,好在很多事情终于尘埃落定,也终于有空继续搞我热爱的技术了。
一直想写一篇关于工业机器人的文章,一来是我的老本行(虽然很多年不研究了),二来这真的是一个十分具有挑战的综合技术方向。
1. 大战略
混过工业圈儿的人,或者一些不混工业圈儿但常看新闻的人肯定都听过“中国制造2025”,其中涉及到的五大工程之一——智能制造工程,就提到工业领域关键岗位机器人代替这个小目标。
所以,说工业机器人技术方向是一个国家级的战略方向,这种说法是不为过的。
下面我就根据之前的行业经验,结合近来翻阅的近几年工业领域相关论文,来盘点一下,工业机器人领域的一些相关技术。
混过工业圈儿的人,或者一些不混工业圈儿但常看新闻的人肯定都听过“中国制造2025”,其中涉及到的五大工程之一——智能制造工程,就提到工业领域关键岗位机器人代替这个小目标。
所以,说工业机器人技术方向是一个国家级的战略方向,这种说法是不为过的。
下面我就根据之前的行业经验,结合近来翻阅的近几年工业领域相关论文,来盘点一下,工业机器人领域的一些相关技术。
2. 分类
工业机器人根据不同的角度有不同的分类方式。
(1) 按照机械臂运动坐标可划分为:直角坐标、圆柱坐标、球坐标、关节坐标等等;
(2) 按照结构可以划分为:串联机器人、并联机器人、串并联机器人等;
(3) 按照轴的数量可划分为:三轴机器人、四轴机器人、六轴机器人等等;
(4) 按照应用行业还可划分为:焊接机器人、码垛机器人、装配机器人、喷涂机器人等等;
还有其他若干分类角度,在这里就不一一列举了。
在我们之前的研发过程中,比较常用的是前两种划分方式,需要根据串并联结构建立轴转角到空间坐标的模型,这个在后文再详细说。
工业机器人根据不同的角度有不同的分类方式。
(1) 按照机械臂运动坐标可划分为:直角坐标、圆柱坐标、球坐标、关节坐标等等;
(2) 按照结构可以划分为:串联机器人、并联机器人、串并联机器人等;
(3) 按照轴的数量可划分为:三轴机器人、四轴机器人、六轴机器人等等;
(4) 按照应用行业还可划分为:焊接机器人、码垛机器人、装配机器人、喷涂机器人等等;
还有其他若干分类角度,在这里就不一一列举了。
在我们之前的研发过程中,比较常用的是前两种划分方式,需要根据串并联结构建立轴转角到空间坐标的模型,这个在后文再详细说。
3. 相关技术
我一直觉得工业用机器人是一门综合行极强的方向,涉及到机械、材料、力学、自动化、电气、电子、计算机乃至仿生学等诸多学科。
一台机器人从无到有的研发过程包含了:机械设计、力学仿真、零件加工、伺服电机、减速器、主控电路板、运动控制系统、机器视觉系统、人机交互界面等多个环节。
这其中与嵌入式系统相关的关键技术有:运动学建模、运动轨迹规划与差补算法、高精度时钟同步、实时控制系统,以及高速通信等。
我一直觉得工业用机器人是一门综合行极强的方向,涉及到机械、材料、力学、自动化、电气、电子、计算机乃至仿生学等诸多学科。
一台机器人从无到有的研发过程包含了:机械设计、力学仿真、零件加工、伺服电机、减速器、主控电路板、运动控制系统、机器视觉系统、人机交互界面等多个环节。
这其中与嵌入式系统相关的关键技术有:运动学建模、运动轨迹规划与差补算法、高精度时钟同步、实时控制系统,以及高速通信等。
4. 部分关键技术
(1) 运动学建模
工业机器人控制最主要的目的就是控制工作平台到空间中的指定坐标,这一过程是通过电机转动带动传动机构实现的,换而言之,参与机器人运动的各个电机的转动角度与空间坐标之间存在一个映射关系,这个关系就是这个机器人的运动学模型。
以最简单的直角坐标机器人为例:
(1) 运动学建模
工业机器人控制最主要的目的就是控制工作平台到空间中的指定坐标,这一过程是通过电机转动带动传动机构实现的,换而言之,参与机器人运动的各个电机的转动角度与空间坐标之间存在一个映射关系,这个关系就是这个机器人的运动学模型。
以最简单的直角坐标机器人为例:

三台电机分别控制工作平台沿着x、y、z三个方向移动,三个电机的转角(θ1, θ2,θ3)与空间坐标(x,y,z)构成一一映射。
但同样的运动学模型在复杂一点儿的机器人上也变得相当复杂。
以著名的串联机器人Stanford机器人为例:
但同样的运动学模型在复杂一点儿的机器人上也变得相当复杂。
以著名的串联机器人Stanford机器人为例:
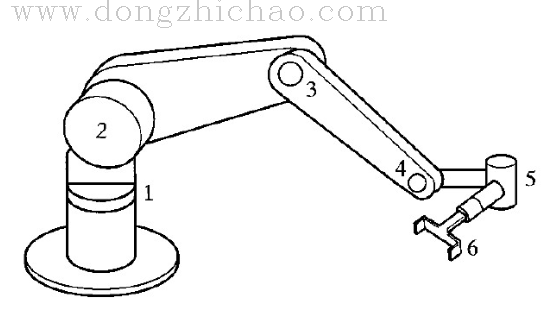
其结构很类似于人类的手臂,存在多个可旋转的关节,我们都知道即使将人手固定在空间中的某一点时,肘部肩部的关节也可以有多种角度,最直接的例子就是霹雳舞中常见的擦玻璃动作,行话管这个空间位置状态叫做“位姿”。
我们称通过各轴转角计算工作平台空间位姿的过程为运动学正解,称由工作平台位姿计算各轴转角的过程为运动学反解,而同一个位姿对应所有的轴转角组合称为解空间。
当解空间内存在多组解的时候,如何选择最优解,需要根据具体的机器人结构参数,自由度的退化,机械限位等多种条件进行选择,这里就不展开讲了。
我们称通过各轴转角计算工作平台空间位姿的过程为运动学正解,称由工作平台位姿计算各轴转角的过程为运动学反解,而同一个位姿对应所有的轴转角组合称为解空间。
当解空间内存在多组解的时候,如何选择最优解,需要根据具体的机器人结构参数,自由度的退化,机械限位等多种条件进行选择,这里就不展开讲了。
(2) 轨迹规划与插补算法
首先解释一下为什么需要轨迹规划。
位于机器人终端的工作平台从空间中的一点运行到另一点,在控制的时候,通常我们只是给出两个端点的坐标,那么在两个坐标之间如何运动,是直线、圆弧、椭圆还是正弦?速度如何?加速度如何?
这些都是轨迹规划需要解决的问题。
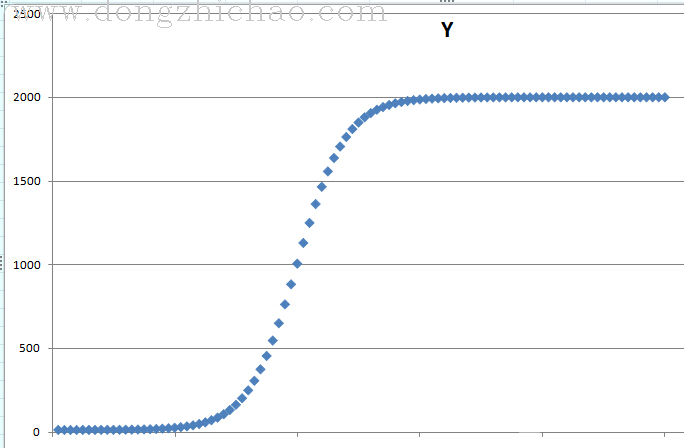
一般动平台从静止到开始运行,并不是直接跑到最高速度,动平台自身都是有重量的,根据动量守恒定律,连接动平台的结构需要承受F=MV的冲力,更何况很多情况下动平台还需要携带负载,所以平缓的加速、减速过程尤为重要,常见的如梯形曲线,S型曲线等等。
首先解释一下为什么需要轨迹规划。
位于机器人终端的工作平台从空间中的一点运行到另一点,在控制的时候,通常我们只是给出两个端点的坐标,那么在两个坐标之间如何运动,是直线、圆弧、椭圆还是正弦?速度如何?加速度如何?
这些都是轨迹规划需要解决的问题。
一般动平台从静止到开始运行,并不是直接跑到最高速度,动平台自身都是有重量的,根据动量守恒定律,连接动平台的结构需要承受F=MV的冲力,更何况很多情况下动平台还需要携带负载,所以平缓的加速、减速过程尤为重要,常见的如梯形曲线,S型曲线等等。
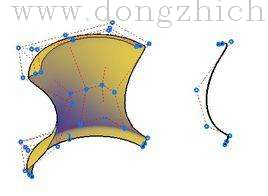
而根据轨迹的规划,在两个端点之间插入若干路径上的坐标点,这类算法就叫做插补算法。
基础的插补算法例如:直线插补、圆弧插补、椭圆插补等等。
但在实际使用中,更为常用的是NURBS(Non-Uniform Rational B-Spline)——非均匀有理B样条,可以灵活定义各种自由曲线、曲面。
基础的插补算法例如:直线插补、圆弧插补、椭圆插补等等。
但在实际使用中,更为常用的是NURBS(Non-Uniform Rational B-Spline)——非均匀有理B样条,可以灵活定义各种自由曲线、曲面。
(3) 时钟同步
时钟同步在多轴的工业机器人中,尤其是多轴的并联型机器人控制系统中起着至关重要的作用。
以著名的Delta机器人为例:
时钟同步在多轴的工业机器人中,尤其是多轴的并联型机器人控制系统中起着至关重要的作用。
以著名的Delta机器人为例:
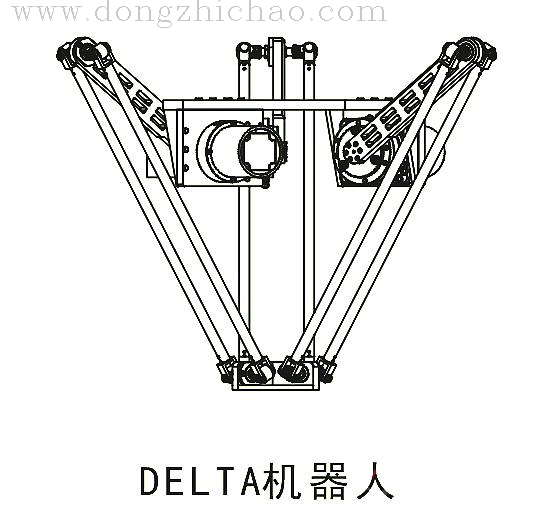
动平台通过三个连杆连接到三组伺服电机,在实际控制系统中,为了保证控制精度和实时性,三组伺服电机通常由三块独立的控制板卡控制。
但由于并联机器人的机械结构,要求连接动平台的三组连杆必须进行严格地同步运动,否则就很容易造成动平台抖动,甚至直接扭断连杆。
所以在实际的控制系统中,通常会采取算法让控制板卡之间的时钟保持同步,而伺服控制命令通常带时间戳执行,这样就能保证机械运动的同步,至于同步的精度则取决于机器人的机械结构以及运行速度,通常<1us。
一种比较经典的时钟同步算法在IEEE 1588中有详细的描述,由于算法比较简单,这里也不多讲了。
(4) 高速通信
高速通信的理由与上一个相同,在机器人控制系统中,用户命令解析,轨迹规划、插补运算等都需要进行很多复杂的运算,而伺服电机的控制又需要很高的实时性,这种冲突通常通过分布式的方式解决,而分布式的控制就需要有高效的通信机制。
对于高速通信技术,不同的公司有其不同的解决方案,其中比较著名的是德国Beckhoff Automation GmbH设计并研发的EtherCAT总线,通常响应时间能大到1us左右。
当然,不仅在工业机器人应用,EtherCAT还广泛用在各种工业现场。
高速通信的理由与上一个相同,在机器人控制系统中,用户命令解析,轨迹规划、插补运算等都需要进行很多复杂的运算,而伺服电机的控制又需要很高的实时性,这种冲突通常通过分布式的方式解决,而分布式的控制就需要有高效的通信机制。
对于高速通信技术,不同的公司有其不同的解决方案,其中比较著名的是德国Beckhoff Automation GmbH设计并研发的EtherCAT总线,通常响应时间能大到1us左右。
当然,不仅在工业机器人应用,EtherCAT还广泛用在各种工业现场。